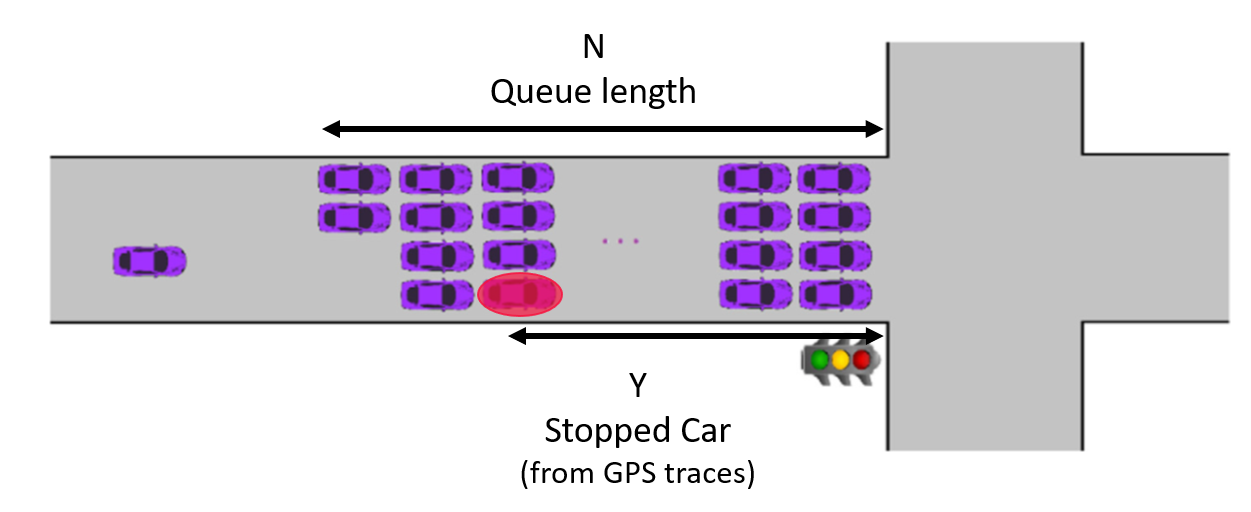
Queue Length Estimation from Connected Vehicles
(joint with Jared Porter, Kameshwar Poolla, and Pravin Varaiya)
Summary: We develop an estimation algorithm that enables us to estimate queue length at every leg of an intersection only using trace data from connected with penetration rate ~1%. We demosntrate the accuracy of our algorithm using real-world data and compare it to measurements done by physical sensors. Our proposed algorithm provide a novel approach to generate metrics needed for performance evaluation, optimization, and real-time operation of urban intersections. In contrast to the existing techniques to estimate queue length, our algorithm does not require physical hardware, provide full coverage of transportation network, and has negligible costs.
Related paper: [W8]

Safety Assessments for Autonomous Vehicles in Urban Environemnts
(joint with Akhil Shetty, Mengqiao Yu, Alex Kurzhanskiy, Kameshwar Poolla, and Pravin Varaiya)
Summary: It seems likely that widespread deployment of AVs will eliminate the large number of crashes caused by impaired, distracted or reckless drivers. However, it is unclear whether AVs will be able to avoid a significant fraction of the remaining crashes for which no driver is directly responsible. As such, deploying AVs without adequately assessing their safety capabilities might lead to an increase in crashes rather than a reduction. In this work, we discuss how an analysis of human crashes can provide insights about the types of crashes that remain challenging for AVs and the role of connected infrastructure in addressing them. We also discuss how human crashes and driving data can be valuable in inferring safety capabilities of AVs in diverse driving contexts. Based on these observations, we provide suggestions for policies and regulations governing the deployment of AVs.
Related paper: [J7,W9,W10]
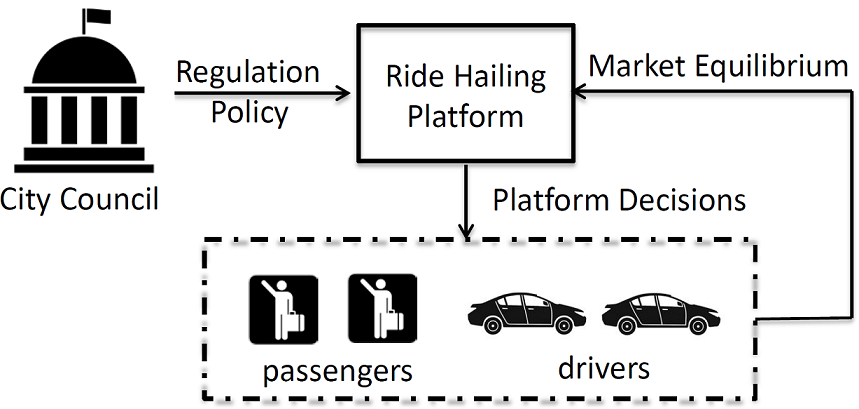
Regulation of Ride-Sharing Platforms
(joint with Akhil Shetty, Sen Li, Kameshwar Poolla, and Pravin Varaiya)
Summary: We Develop an empirically calibrated model and investigate the effect of the recently implemented regulations in NewYork City and California on
platforms'revenue, prices, drivers' earnings, ridership, and congestion. We analyze how TNC operation is affected by recent regulationss due to two effects: (a) increase in driver wages due to minimum wage and overtime compensation requirement; (b) loss of flexibility of driver working schedules.
Related paper: [J5,C9,W11]
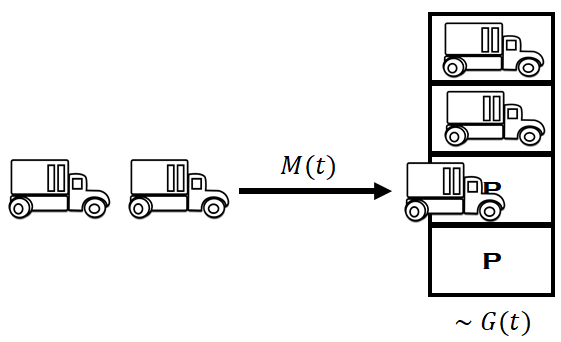
Parking Modeling & Prediction - a Queuing Approach
(joint with Kameshwar Poolla and Pravin Varaiya)
Summary: We propose a queuing model with a non-homogeneous arrival rate and time-varying service time distribution to capture the parking dynamics. We verify all assumptions of
the model using statistical tests on real data, which provides empirical support for queuing models adopted in
many theoretical studies. We propose two prediction methods, a microscopic method for short forecast horizon
(~up to 2 hours), and a macroscopic method for long forecast horizons (~4 to 48 hours). We demonstrate that
our proposed methods outperform existing model-based and model-free methods proposed in the literature.
Related paper: [W5]
Information Design in Transportation Networks
(joint with Kameshwar Poolla, Akhil Shetty, Demosthenis Teneketzis, and Pravin Varaiya)
Summary: We study the design of information platforms as an information
mechanism design problem. We show that a social planner can improve congestion by
providing either a public imperfect information signal about road conditions, or alternatively, coordinated
private route suggestions to each driver. We investigate how the structure of the optimal mechanism changes in a dynamic setting where drivers learn from their past experience. We then study competitive environments with for-profit platforms. We show that each platform finds it optimal to fully disclose its information for free. As such, we demonstrate that a competitive environment with multiple platforms can result in increased congestion compared to the outcome under a single information platform or in the absence of any information platforms.
Related papers: [C8,C6,W2]
A Unified Approach to Dynamic Decision-Making in Multi-Agent POMDPs: Strategic and Non-Strategic Agents
(joint with Demosthenis Teneketzis, and Ouyang Yi)
Summary: In multi-agent Markov decision problems with partial observations (multi-agent POMDPs), there is a circular dependency between agents' strategies and beliefs over time. The analysis of these problems is a challenging task as the computational complexity grows exponentially with the time and the number of agents. We develop a framework addressing these scalability and complexity challenges. We generalize the notion of information state in partially observable Markov Decision Processes (POMDP) to multi-agent POMDPs. Our framework unifies and generalizes various existing results in the literature from both control theory and game theory literature. Our results provide a reduction of (a) dynamic team problems with non-classical information structure to a sequence of static centralized problems, and (b) dynamic games with asymmetric information to a sequence of static games with symmetric information.
Related papers: [W6,W4,J6,B1]
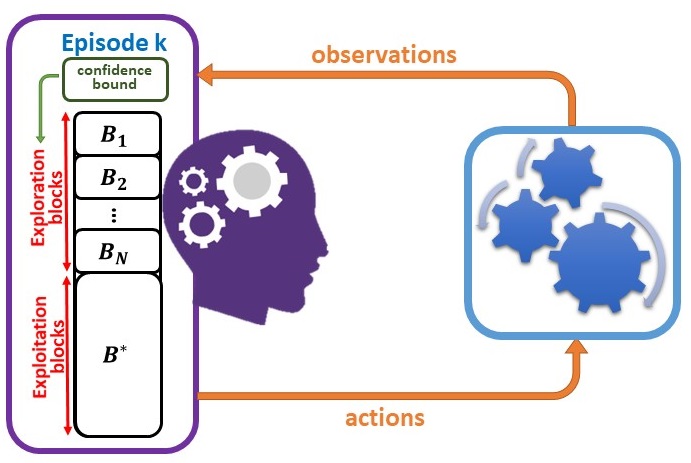
An Asymptotically Regret-Optimal Algorithm for Reinforcement Learning in POMDPs - a Sequential Hypothesis Testing Framework
(joint with Kameshwar Poolla, and Pravin Varaiya)
Summary: We develop reinforcement learning algorithms with theoretical regret guarantees for both single-agent and multi-agent POMDPs with an average cost objective. Formulating the problem as a sequential hypothesis testing, we characterize a lower bound on the regret in a singe-agent POMDP. We explicitly quantify the trade-off between exploration and exploitation, enabling us to design an (asymptotically) regret-optimal algorithm. The algorithm is compromised of a sequence of separate episodes for exploration and exploitation, the length of which are determined adaptively over time to ensure the optimal trade-off between exploration and exploitation. We further generalize our results to multi-agent POMDPs using the transformation framework we developed in [S6,S7]. In particular, to address the coordination issue between agents who have asymmetric partial information, we use the common information among the agents as the coordination device to adjust the length of the exploration and exploitation episodes.
Related papers: [W3]
Dynamic Market Design for Renewable Energy
(joint with Demosthenis Teneketzis)
Summary: Unlike conventional resources in enrgy power systems, information about renewable generation and
flexible loads arrives dynamically over time; for instance, the wind
generation depend on the real-time wind speed. Accordingly, we propose a class of dynamic contracts and dynamic handicapped auctions to procure renewable generation or demand flexibility by an aggregator. The dynamic nature of the mechanisms allow sellers to adjust their position in the market according to new information they individually acquire over time while enabling the aggregator to determine its forward commitment level to serve inflexible demand in advance.
Related papers: [W1,J2,C3,C1]
Dynamic Resource Allocation and Incentive Mechanism for Security in Networks of Interdependent Agents
(joint with Farzaneh Farhadi, Jamal Golestani, and Demosthenis Teneketzis)
Summary: We study the design of incentive mechanisms to improve security in a network of interdependent agents. On one hand, the strategic behaviors of agents become more complex in a dynamic setting, as each agent can coordinate its decisions over time. On the other hand, a dynamic setting creates new opportunities for designing incentive mechanisms by exploiting the inter-temporal correlation of observations over time. Exploiting the inter-temporal correlation of agents' observations over time, we construct a set of inference signals about every agent's decision and information. We then construct incentive payments to internalize the effect of each agent on the overall network security level. Accordingly, we propose an incentive mechanism that is socially ecient, incentive compatible, and individually rational for all agents. Our results are in contrast to prior impossibility results which state that such effcient mechanisms do not exist for static settings.
Related papers: [J4,C5]
